Датчики положення з аналоговим виходом






















Аналоговые Индукционные преобразователи
Измерительные Индукционные преобразователи предусмотрены для преобразования расположения (движения) в электронный сигнал. Cчитаются более помехоустойчивыми, малогабаритными, верными и экономными и измеряемыми преобразователями во время осуществлении вопросов в автоматике вычисления линейных параметров в приборо - и машиностроении.
Физические основы во время работы индукционных преобразователей
Важными составляющими индукционного преобразователя считаются катушка с 2-мя либо больше витками и сосредоточенный изнутри катушки - подвижный якорь.
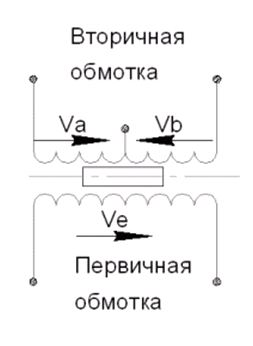
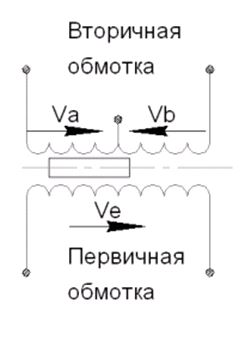
Индукционные преобразователи изготавливаются 2ух главных видов, смотря какая схема подключения обмоток и месторасположение: полу-мостовые и дифференциально-трансформаторные. Дифференциально-трансформаторные преобразователи имеют две вторичные обмотки, включённые навстречу друг другу и первичную обмотку . Во время подачи на первичную обмотку переменного напряжения питания Ve, во вторичных обмотках наводятся напряжения такой же частоты Va и Vb, направленные в любой эпизод медленно на встречу один другому. Когда месторасположение якоря одинаково по осям относительно вторичным обмоткам, Va = Vb и общая сила на заключениях вторичных обмоток приравнивается нулю. При изменении положения якоря в какой-нибудь направленности, к примеру, налево, растет усилие на какой- то из вторичных обмоток, а в иной – падает. Приводит к происхождению сигнала, одинакового Va – Vb. Этот знак принимается вторичным устройством и преобразуется в положение, более комфортное для средств вычислительной аппаратуры, либо для восприятия людей.
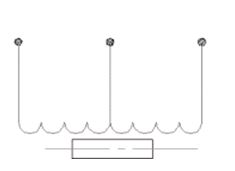
Полу-мостовые преобразователи имеют 2-е включенные навстречу друг другу обмотки, которые образуюют 1/2 индуктивного моста. 2-ая его половинка является входным делителем вторичного устройства. При симметричном месторасположении якоря, относительно обмоткам, усилие в мосту диагонали равно нулю и мост сбалансирован. Давление якоря вызывает одинаковую разбалансировку моста. Знак дисбаланса преобразовывается так, как в прошлом случае.
Аналоговые индукционные детекторы
Представлены индуктивные детекторы расстояния с аналоговым выходным сигнализатором. На выходе, аналоговые индукционные детекторы расстояния имеют прямолинейный знак по току
(4..20 mА) либо по напряжению питания (0.. 10 V), соразмерный пути до металлического объекта измерения.
Аналоговые датчики: методы включения к контроллеру, использование.
В процессе автоматизации научно-технических действий для контроля приспособлениями и аппаратами необходимо иметь дело с вычислениями разных физ. показателей. Это и расход воды либо газа , давление, температура, сила света, частота вращения, данные о расположении долей устройств и др. Такие данные получаются благодаря измерителям.
Использование аналоговых измерителей
Обширное использование обретают аналоговые датчики, не считая дискретных измерителей в устройствах автоматики . Их предназначение – приобретение данных о разных физ. величинах. А более точно - преобразование физ. величины (освещенность, давление, расход, температура, напряжение, ток) в электронный сигнал, кот. пригоден для передачи по линиям коммуникации в контроллер и последующая его обработка.
Аналоговые детекторы размещаются обычно довольно далековато от контроллера, почему нередко они называются полевыми устройствами. Данный термин нередко используется в тех. литературе.
Аналоговый приёмник, обычно, состоит из нескольких составляющих. Одна из основных частей - это чувствительный элемент – сенсор. Его предназначение -это преобразовать измерительную величинув гальванический знак. Однако знак, полученный от детектора, не слишком велик. Чтобы получить сигнал, пригодный для усилия, сенсор зачастую включается благодаря мостовой схеме – мостик Уитстона.

Как устроен индуктивный преобразователь.
В индукционный преобразователь входит корпус, в котором на направляющих качения расположен шпиндель, на заднем конце расположен якорь, а на переднем конце замерный наконечник. Направляющая защищена от наружных действий резиновым манжетом. Якорь , соединенный со шпинделем, располагаться изнутри прикрепленной в корпусе катушки. В свою очередь обмотки катушки электрически соединены при помощи кабеля, который защищён конической пружиной от перегибов и прикрепленным в корпусе. На вольном конце кабеля есть разъем, необходимый для включения преобразователя к вторичному устройству. Корпус и шпиндель исполнены из закаленной нержавеющей стали. Переходник, объединяющий шпиндель и якорь состоит из сплава титанового. Пружина, которая создаёт измеряемое напряжение, отцентрирована, будто ликвидирует трение, созданное при перемещении шпинделя. Таковая система преобразования гарантирует пониженную случайную погрешность и варианты показания по значению меньше 0,1 мкм.